Create the Search Method
If you prefer you can watch a screencast video:
![]()
The special task of a service robot we will simulate in this tutorial is to search for a mobile object. Imagine that a person instructs the robot to bring a glass of apple juice. The robot has to understand the spoken instruction, parse it into simple actions, plan the actions and finally perform the task. In this example the robot has to search for a juice glass then to search for apple juice, bring the juice to the glass, fill the glass with the juice and finally bring the glass to the person.
In this tutorial we will consider one frequent task: search for an object
This search algorithm consists of the following parts:
- Get the the parameters for the search using a simple GUI:
- the search Object
- and for the simulation the current position of the robot
- and the current position of the search object
- Retrieve all positions from the database where the search object could be together with the probability (score) that the object is really there.
- Calculate the path to each possible position
- Decide to which position the robot should go first
- Go to this position and look for the search object there
- If the object is really there or if this is the last possible search position show the robot's search path else continue the search with the remaining positions at step 3.
To implement the search algorithm create a new package in Eclipse: operations
Then create a new JAVA class Operations in this package.
Retrieve Positions of Search Object
Inside of the class Operations write a new method createPosList(). As the name says the result should be a list of positions and positions are vertices. To determine possible positions of the search Object the method needs the search object as a parameter which is also a vertex. So we get:
public List<Vertex> createPosList(Vertex obj) {
To retrieve possible positions of the search object we can use SQL and query the PROB_IS_AT subclass of E. There are two alternatives for each PROB_IS_AT edge:
- Either we have a direct connection from an object to a position
- Or we we have a connection from one object to another object, e. g. a bottle of milk is inside the refrigerator.
Hence we first retrieve all directly connected positions of our search object. This is a simple SQL-query:
OSQLSynchQuery query1 = new OSQLSynchQuery ("select in as pos, Score as combiScore from PROB_IS_AT where out = ? and in.@class = 'Position'");
Each edge connects two vertices: out specifies the source vertex where the edge comes out and in specifies the target vertex where the edge goes into. out must be our search object. Instead of doing some String-operations and insert the rid (record id) of the object into the where condition we use a prepared query. The '?' in where out = ? is a parameter that is passed at execution time.
Since we are only interested in PROB_IS_AT edges leading to a Position we add a second condition: the class of the target vertex must be 'Position'. The record attribute @class returns the class of a vertex.
Then the query is executed: db.command(query1).execute(obj)
The result is not a List but an Iterable. So we have to convert it into a list. However we not only want to store the positions but also their Score value. Hence we define a new class PositionScore for pairs of position and score.
package operations;
import com.tinkerpop.blueprints.Vertex;
/*
* Data structure to store a Position vertex together with a calculated score
*/
public class PositionScore {
public Vertex pos;
public Float score;
public PositionScore(Vertex pos, Float score) {
this.pos = pos;
this.score = score;
}
}
Now we can declare a list where the positions are collected in createPosList().
List <PositionScore> posList = new ArrayList <PositionScore> (); //Result list
Insert each position returned by the database into this list.
for (Vertex result: (Iterable<Vertex>) db.command(query1).execute(obj)) {
posList.add(new PositionScore (result.getProperty("pos"), (Float) result.getProperty("combiScore")));
}
As second step we retrieve all positions where an object is connected to another object
The SQL-query is a little bit more complicated. We want to find the following situation:
MobileObject obj --> PROB_IS_AT e1 --> another mobile object --> PROB_IS_AT e2 --> Position pos
To get the Position vertices we have to follow the arrows. Start the search with PROB_IS_AT e1 which starts at the MobileObject obj. Hence the FROM- and WHERE-part of the SQL-query is from PROB_IS_AT where out = ?. in delivers the other object and from this object we want to get all outgoing edges of class 'PROB_IS_AT': in.outE('PROB_IS_AT') .
So we try the following query:
select @rid as e1, in.outE('PROB_IS_AT') as e2 from PROB_IS_AT where out = ? and in.@class = 'Object'
The result of this query is an edge together with a list of edges like in this example.
| e1 | e2 |
|---|---|
| #20:1 | [#20:2, #20:3] |
| #20:10 | [#20:4, #20:5] |
However we want a list of pairs e1, e2 as a result:
| e1 | e2 |
|---|---|
| #20:1 | #20:2 |
| #20:1 | #20:3 |
| #20:10 | #20:4 |
| #20:10 | #20:5 |
The unwind expression will create one pair of edges in the result set for each e2 entry. We adjust our query to
select @rid as e1, in.outE('PROB_IS_AT') as e2 from PROB_IS_AT where out = ? and in.@class = 'Object' unwind e2
Finally we don't want to get the edges but Positions and scores. So we wrap the query by an outer SQL-query. From e2 we retrieve e2.in as position pos and from e1 and e2 we calculate a combined score: eval('s1 * s2 / 10') as combiScore. The division by 10 is necessary because our score values vary from 0 to 10. Attention! The eval-function expects the formula as String.
select e2.in as pos, e1.Score as s1, e2.Score as s2, eval('s1 * s2 / 10') as combiScore from (select @rid as e1, in.outE('PROB_IS_AT') as e2 from PROB_IS_AT where out = ? and in.@class = 'Object' unwind e2)
Again we iterate over the result set and fill our result list posList with PositionScore pairs.`
Excursus: Comparison to query in ralational database
If you like you can compare the last OrientDB query on a graph database with a corresponding query on a relational database. Suppose we had three tables: A Position-table with the coordinates x, y and z as columns and a PID as primary key, a MobileObject-table with OID as primary key a connection table PROB_IS_AT_O_To_O-table with a score column and with OIDout and OIDin as foreign keys which connects two mobile objects and a connection table PROB_IS_AT_O_To_P with a score column and OID and PID as foreign keys which connects an object with a position.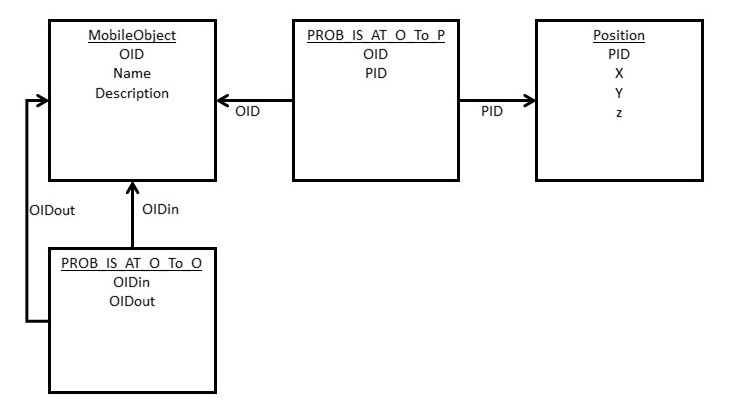
Three slow join operations are necessary for the query, using a relational database.
SELECT pos.x, pos.y, pos.z, proboo.score * probop.score / 10 as combiScore
FROM PROB_IS_AT_O_To_O proboo, MobileObject mo, PROB_IS_AT_O_To_P probop, Position pos
WHERE proboo.OIDin = mo.OID AND
mo.OID = probop.OID AND
probop.PID = pos.PID AND
proboo.OIDout = ?
Excursus: Traversing a graph
Imagine there would be more than one indirection possible in the PROB_IS_AT relation between mobile objects, e.g. a glass is on a tablet which is on a table. Then we would have this representation in the graph:
MobileObject o1 -PROB_IS_AT-> MobileObject o2 -PROB_IS_AT-> ... MobileObject on -PROB_IS_AT-> Position p
If we don't know how many times we have to follow PROB_IS_AT from one mobile object to the next until we reach a position we cannot use SELECT. For these cases OrientDB offers the TRAVERSE command. See the documentation for the full syntax of TRAVERSE. The syntax for a simple form is:
TRAVERSE <fields> FROM <target>
In our application the target is a single vertex: the search object o1. In fields specify the fields necessary to follow the path: outE('PROB_IS_AT') to get all edges of class PROB_IS_AT starting at o1 and later at o2, o3 ... on, and PROB_IS_AT.in to get the destination vertices of these edges: o2, ... on, p.
Surround the TRAVERSE command with a SELECT command to specify the desired result of the query (projection operation) and a WHERE condition to filter only the paths which end at a position: WHERE @class = 'Position'. Combine the pieces to the complete SQL command if o1 is the vertex with id #19:3:
SELECT @rid, $path
FROM (
TRAVERSE outE('PROB_IS_AT'), PROB_IS_AT.in
FROM #19:3
)
WHERE @class = 'Position'
Calculate the paths to all positions in the position list
If you prefer you can watch the next screencast video:
![]()
Having implemented CreatePosList() we can now implement the method SearchForObject() and use CreatePosList() there. Create a function searchForObject() which first calls createPosList().
public String searchForObject (Vertex start, Vertex dest, Vertex searchObject) {
ArrayList <PositionScore> posList = createPosList (searchObject); //Create list of positions where object could be together with scores and store it in posList
if (posList.isEmpty()) return "No positions exist where object " + searchObject.getProperty("Name") + " could be";
String startRid = start.getId().toString();
The search is a routing task. One possible routing algorithm is the Dijkstra algorithm. It is implemented in OrientDB (dijkstra function in OrientDB) and thus can be executed on the server without data transfer to the client.
We iterate the position list posList and for each position calculate the path to it from the current position of the robot, the estimated time to traverse the path and finally the ratio of passing time to the score of the position. The lower the pass time or the higher the score, the better is that position. The position with the least (pass time / score)-ratio is chosen as the next position where the robot should go.
public String searchForObject (Vertex start, Vertex dest, Vertex searchObject) {
... // some other code is discussed later (see below)
PositionScore bestPos = null; // Store position with best passTime/Score ratio found so far in bestPos
float bestCost = Float.MAX_VALUE; // bestCost = passTime/Score ratio of best bestPos
Iterable<OrientVertex> pathToBestPos = null;
for (PositionScore ps: posList) {
// let OrientDB calculate the best path to position ps.pos using the dijkstra algorithm
String destRid = ps.pos.getId().toString(); // id of Vertex dest
String dijkstraQueryString = "SELECT dijkstra(" + startRid + ", " + destRid + ", 'PassTimeSec', 'BOTH', 'IS_CONNECTED_TO')";
OSQLSynchQuery dijkstraQuery = new OSQLSynchQuery(dijkstraQueryString);
Iterable <Vertex> result = db.command(dijkstraQuery).execute();
NOTE: The result of
db.command(<OSQLSynchQuery>).execute()is always a list of vertices as Iterable. Even if you expect a list of integer e. g. in the querySELECT MIN(x) FROM Position GROUP BY inLocationyou get a list of vertices with a property "MIN".
Therefore you have to iterate Iterable <Vertex> result though result has only one element. With v.getProperty("dijkstra") you get the result of the dijkstra function which is the list of vertices on the path.
Iterable <OrientVertex> pathIterable = null;
for (Vertex v: result) { pathIterable = v.getProperty("dijkstra"); break; }
if (pathIterable != null) {
float timePerScore = calculatePathPassTime(pathIterable) / ps.score;
if (timePerScore < bestCost) { // is the new position better than the best position so far regarding timePerScore?
bestPos = ps;
pathToBestPos = pathIterable;
bestCost = timePerScore;
}
}
}
Repeat the search until the object is found or all possible positions are visited
Go the position with the best (passTime/Score)-ratio and look for the search object there. If the object is there the search is finished. Otherwise remove the current position from the position list and repeat the search: this is the enclosing while-loop.
while (!posList.isEmpty()) {
... // search using the dijkstra function, see code above
if (pathToBestPos != null) {
ArrayList <Vertex> currentPath = new ArrayList <Vertex> ();
for (OrientVertex v: pathToBestPos) {
currentPath.add(v);
}
searchPath.add(currentPath);
if (bestPos.pos.getId().toString().equals(dest.getId().toString())) {
System.out.println("Object " + searchObject.getProperty("Name") + " found at position " + bestPos.pos.getId().toString());
return "Object " + searchObject.getProperty("Name") + " found at position " + bestPos.pos.getId().toString();
}
startRid = bestPos.pos.getId().toString(); // Update current position of robot which is new start
} else {
// pathToBestPos == null means that there is no path to any possible position of the object.
System.out.println("Robot cannot reach the object " + searchObject.getProperty("Name"));
return "Robot cannot reach the object " + searchObject.getProperty("Name");
}
posList.remove(bestPos);
if (posList.isEmpty()) {
System.out.println ("Robot could not find Object " + searchObject.getProperty("Name"));
return "Robot could not find Object " + searchObject.getProperty("Name");
}
}
Since the the function searchForObject() returns a string with information about the success of the search the search path has to be stored in a variable: private ArrayList <ArrayList <Vertex>> searchPath with this instruction: searchPath.add(currentPath)
The search function is now ready to use. In the next step you can download a GUI that calls the search method.